
Complessi movimenti collettivi nascono da semplici interazioni tra corpo e ambiente.
Gli Air dancer, i pupazzi gonfiabili dinamici che si vedono “danzare” di fronte ad alcuni negozi per attirare l’attenzione, sono legati e si agitano senza una logica apparente.
Il comportamento, basato sulla deformazione di strutture flessibili, è stato sfruttato dal ricercatore italiano Alberto Comoretto che, insieme ai colleghi Mannus Schomaker e Bas Overvelde dell’istituto AMOLF di Amsterdam (Paesi Bassi), ha creato un robot morbido che cammina, salta e nuota coordinandosi senza la necessità di un cervello elettronico o comandi in remoto, assemblando un set di tubi elastomerici piegati ed alimentati da un flusso d’aria continuo.
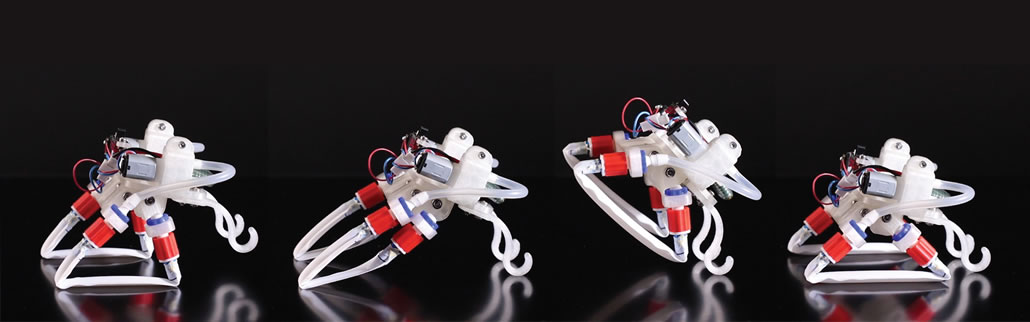
Senza segnali di controllo, gli arti gonfiabili reagiscono alle interazioni fisiche con l’ambiente con una strategia di locomozione estremamente rapida, autonoma e sincronizzata.
Il principio del funzionamento
Ciascun tubolare oscilla sotto l’azione del flusso d’aria. Singolarmente, ogni gamba si muove in modo casuale, ma quando vengono accoppiate accade qualcosa d’inaspettato: i movimenti si sincronizzano velocemente, assumendo andature ritmiche.
Il primo autore dello studio, Comoretto, ha spiegato come l’ordine emerga dal caos senza bisogno di codici o istruzioni, come le lucciole che lampeggiano in sincronia o le cellule cardiache che pulsano all’unisono.
A tutta velocità!
Il meccanismo raggiunge 30 lunghezze corporee al secondo. Relativamente parlando, una Ferrari arriva “solo” a 20 lunghezze al secondo, un traguardo superiore a quella di altri robot ad aria compressa con controllo centralizzato.
Intelligenza adattiva
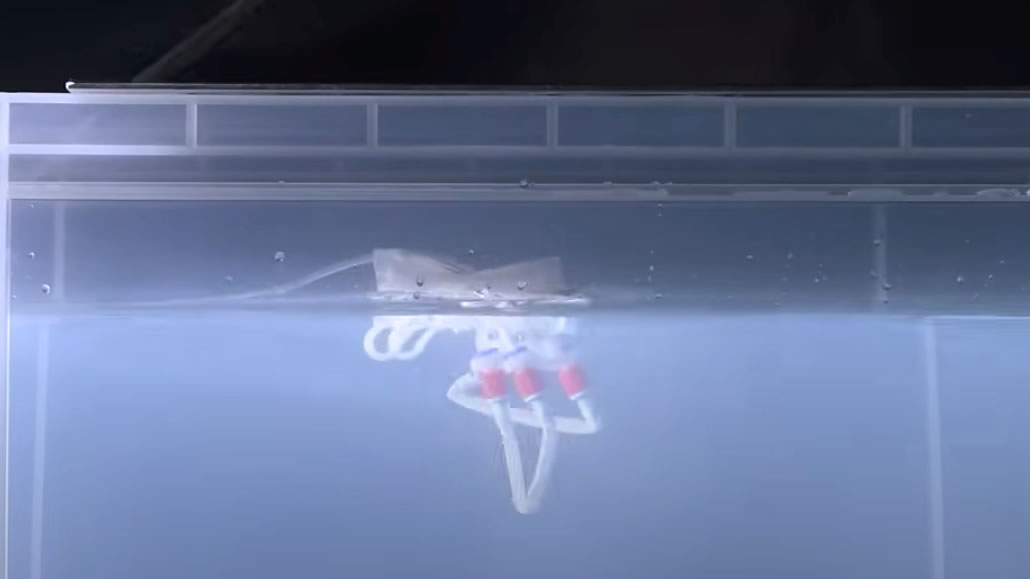
Un’altra sorprendente proprietà è la sincronizzazione adattiva. Se il robot incontra un ostacolo, si riorienta e prosegue nel suo percorso. Quando si sposta dalla terraferma all’acqua, l’andatura passa spontaneamente da un saltello in fase al nuoto a stile libero. La transizione emerge dalla reciproca influenza con l’ambiente.
Il coautore Mannus Schomaker ha citato il paragone con la biologia dove, ad esempio, le stelle marine coordinano centinaia di piedi utilizzando feedback locali e dinamiche corporee, non un cervello centralizzato.
Per il tipo di comportamento, Bas Overvelde preferisce la definizione di macchina capace, con una corretta progettazione, di superare in prestazioni molti sistemi robotici ed agire come una creatura artificiale.
Le possibili applicazioni vanno dalle pillole intelligenti alla tecnologia spaziale.
Microrobot sicuri, privi di elettronica possono essere ingeriti e rilasciare farmaci dopo aver raggiunto autonomamente il tessuto bersaglio. Tute robotiche indossabili potrebbero sincronizzarsi con il passo umano senza processori, riducendo il consumo energetico e migliorando la forza fisica. Macchine n grado di adeguarsi ad ambienti estremi come lo spazio.
Lo studio è stato pubblicato su Science.
RIPRODUZIONE RISERVATA – © 2025 SHOWTECHIES – Quando la Tecnologia è spettacolo™ – E’ vietata la riproduzione e redistribuzione, anche parziale, dell’articolo senza autorizzazione scritta. Se desideri riprodurre i contenuti pubblicati, contattaci.
Immagini: AMOLF



Commenta per primo